As the recent robot systems tend to operate closely with humans, the safety of recent robot systems is getting more attention in the robotics community, both in academia and industry. However, safety has not received much attention within the medical and surgical robotics domain, despite its crucial importance. Another practical issue is that building medical and surgical robot systems with safety is not a trivial process because typical computer-assisted intervention applications use different sets of devices such as haptic interfaces, tracking systems, imaging systems, robot controllers, and other devices. Furthermore, this increases the scale and complexity of a system, making it harder and harder to achieve both functional and non-functional requirements of the system.
This project investigates the issue of safety of medical robot systems with the consideration of run-time aspects of component-based software systems. The goal is to improve the safety design process and to facilitate the development of robot systems with the consideration of safety, thereby building safe medical robot systems in a more effective, verifiable, and systematic manner. Our first step is to establish a conceptual framework that can systematically capture and present the design of safety features. The next step is to develop a software framework that can actually implement and realize our approach within component-based robot systems. As validation, we apply our approach and the developed framework to an actual commercial robot system for orthopaedic surgery, called the ROBODOC System.
For this research, we use the cisst libraries, an open source C++ component-based software framework, and Surgical Assistant Workstation (SAW), a collection of reusable components for computer-assisted interventional systems.
Safety Design View
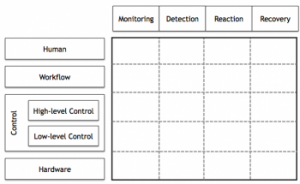
A variety of medical and surgical robot systems have been developed in academia and industry and commercial products are actively used in modern operating rooms. However, there is no safety standard that specifically governs the design of medical robot systems. Despite the availability of several safety design guidelines, the absence of a basis or foundation for safety makes it dicult to describe safety designs in a systematic manner, and to share knowledge and experiences on safety with others. In the meantime, the scale and complexity of recent medical robot systems have been increasing and this further complicates the effective representation and sharing of safety designs. As an approach to this issue, we propose the Safety Design View, a conceptual framework that can capture and describe both the design-time and run-time characteristics of safety features of medical robot systems in a systematic and structured manner. To illustrate the application of the Safety Design View, we collected a set of frequently used safety features, based on our literature review of safety in the medical robotics domain, and show how we can more effectively describe and understand safety designs of medical robot systems.
Safety Design View: A Conceptual Framework for Systematic Understanding of Safety Features of Robot Systems Proceedings Article
In: IEEE Intl. Conf. on Robotics and Auto. (ICRA), pp. 1883-1888, Hong Kong, China, 2014.
Safety Framework
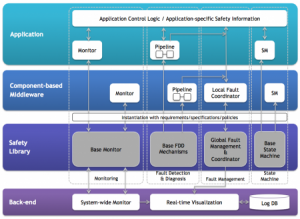
As modern medical robot systems are required to perform complex surgical tasks with various sensing and actuation capabilities, it is becoming more important to integrate a variety of sensors, actuators, and control loops into a single system. However, the consideration of nonfunctional properties such as performance and fault tolerance complicates the integration and makes it harder to achieve system safety. In medical robotics, such system issues have not received much attention despite a consensus on the importance of safety within the domain. As our approach to this issue, we present a run-time software environment for safety research on component-based medical robot systems, called the Safety Framework. This framework aims to provide systematic safety methods by decomposing safety features into reusable safety mechanisms and safety specifications. This decomposition enables the accumulation of safety experience and knowledge in a traceable manner, and provides reusable safety design guidelines for designing new medical robot systems.
Run-time Safety Framework for Component-based Medical Robots Proceedings Article
In: 4th Workshop on Medical Cyber Physical Systems, CPS Week, Philadelphia, PA, 2013.
Fault Detection and Diagnosis for Component-based Robotic Systems Proceedings Article
In: IEEE Intl. Conf. on Technologies for Practical Robot Applications (TePRA), Woburn, MA, 2012.
A layered approach for identifying systematic faults of component-based software systems Proceedings Article
In: 16th International Workshop on Component-Oriented Programming (WCOP'11), pp. 17-24, Boulder, Colorado, USA, 2011.
Publications
An Architectural Approach to Safety of Component-based Robotic Systems Proceedings Article
In: IEEE Intl. Conf. on Robotics and Automation (ICRA), pp. 3360-3366, Stockholm, Sweden, 2016.
Safety Design View: A Conceptual Framework for Systematic Understanding of Safety Features of Robot Systems Proceedings Article
In: IEEE Intl. Conf. on Robotics and Auto. (ICRA), pp. 1883-1888, Hong Kong, China, 2014.
Run-time Safety Framework for Component-based Medical Robots Proceedings Article
In: 4th Workshop on Medical Cyber Physical Systems, CPS Week, Philadelphia, PA, 2013.
Fault Detection and Diagnosis for Component-based Robotic Systems Proceedings Article
In: IEEE Intl. Conf. on Technologies for Practical Robot Applications (TePRA), Woburn, MA, 2012.
A layered approach for identifying systematic faults of component-based software systems Proceedings Article
In: 16th International Workshop on Component-Oriented Programming (WCOP'11), pp. 17-24, Boulder, Colorado, USA, 2011.